Un equipo de investigadores de la Universidad de Harvard ha fabricado el primer robot totalmente autónomo sin presencia de cables ni sistema de control electrónico y de material blando, todo ello controlado únicamente por microfluidos.

Ilustración del Octobot realizado por R Truby, M Wehner, l Sanders y la Universidad de Harvard.
Este pequeño robot producido por impresión 3D, este ingenio con forma de pulpo y apodado Octobot, podría allanar el camino para una nueva generación de máquinas autónomas fabricadas en materiales completamente blandos y que interactúen de forma distinta con los seres humanos. Los resultados del trabajo se publicaron en la revista Nature.
Tal y como narra el equipo investigador, la mayor dificultad que tuvieron, fue la de sustituir los componentes rígidos por sistemas blandos que resultasen similares y después juntarlos todos. “Nuestra investigación demuestra que si se pueden fabricar los componentes de un robot simple con materiales blandos, también se pueden hacer para diseños más complejos”, explica Robert Wood, uno de los directores del proyecto.
Otra dificultad añadida tal y como explica Sinc Ryan Truby, científico del Wyss Institute for Biologically Inspired Engineering de Harvard y uno de los autores, “muchos grupos de investigación de todo el mundo están interesados en la creación de robots hechos de materiales blandos, pero estos sistemas todavía requerían fuentes de energía y electrónica convencionales que dificultaban su desarrollo y sus posibles aplicaciones”.
Además añade Sinc Ryan Truby que resolvieron este reto “mediante el uso combinado de un combustible peróxido de hidrógeno y un circuito lógico de microfluidos, que permitió hacer un robot blando autónomo sin necesidad de recurrir a las fuentes de energía ni a los sistemas electrónicos típicos”. De tal forma que, el octobot, similar a un pulpo, tiene una base neumática, es decir, que es alimentado por gas a presión. Una reacción en el interior del robot transforma una pequeña cantidad de combustible líquido (peróxido de hidrógeno) en una gran cantidad de gas, que desemboca en los brazos del robot y los infla como un globo.
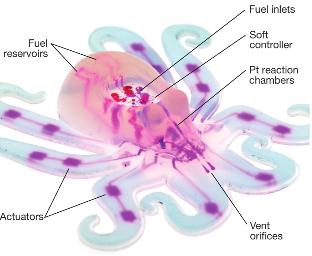
Esquema ilustrativo de las partes del Octobot.

Ilustración que muestra la distribución de las válvulas de retención y conmutación en el sistema.

Ilustración que muestra en la parte superior los elementos principales que permite el funcionamiento del Octobot y en la parte inferior una analogía con un esquema eléctrico.
Video del funcionamiento del Octobot.
El ingeniero indica que en la fabricación de Octobot se ha usado una mezcla de litografía blanda, piezas de fundición, y una nueva técnica de impresión 3D embebida llamada EMB3D.
“En total –añade– hemos utilizado tres tipos diferentes de materiales para hacer el robot: PDMS, un caucho de silicona común; un gel al que llamamos ’tinta fugitiva’, usada para imprimir las redes actuadoras del dispositivo, y reservorios de combustible. También hemos incluido una tinta catalítica que transporta partículas de platino que se convierten en catalizadores para la descomposición de combustible”.
La actual versión de Octobot tiene una autonomía de 10 minutos. “Sin embargo, nuestra estrategia de diseño nos permitirá en el futuro que estos robots funcionen con duraciones mucho más amplias, prácticamente del tiempo que se desee”.
Respecto a las aplicaciones, Truby destaca que este tipo de robots blandos son más seguros y adecuados en aplicaciones que incluyan una interfaz entre máquinas y humanos. "Podrán ser usados en biomedicina y en tecnología wearable".
No hay comentarios:
Publicar un comentario