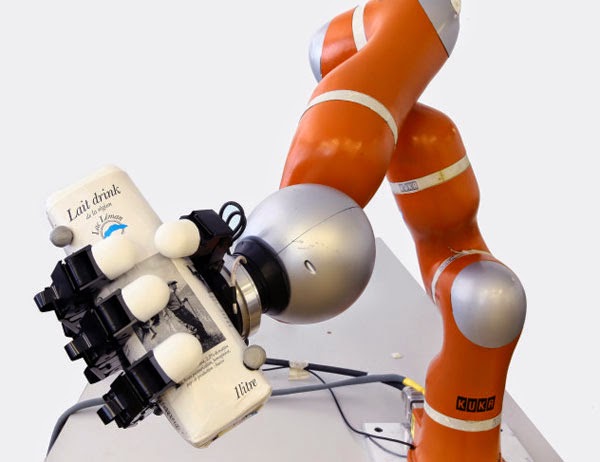
Un nuevo brazo robot desarrollado por investigadores de la Escuela Politécnica de Lausana, en Suiza, es capaz de detectar la trayectoria de un objeto y atraparlo en menos de cinco centésimas de segundo.
El ingenio, de 1,5 metros de largo, está equipado con tres articulaciones y una cibermano cuyos cuatro dedos pueden asir proyectiles incluso de forma irregular. Durante las pruebas, se utilizaron botellas vacías y medio llenas, raquetas de tenis, un martillo y una pelota.
“Los robots cada vez estarán más presentes en nuestras vidas. Necesitaremos máquinas que además de reaccionar en el acto sean capaces de predecir la dinámica de un objeto y generar movimientos en dirección opuesta”, señala la experta en inteligencia artificial Aude Billard, que dirige el Laboratorio de algoritmos de Aprendizaje y Sistemas (LASA) de la citada institución.
De hecho, algunos científicos señalan que el dispositivo ya podría utilizarse en el espacio, por ejemplo en el proyecto Clean- mE, impulsado por el Centro Espacial Suizo, que diseña planes para retirar la chatarra espacial que rodea la Tierra.
La idea es que un ingenio parecido fijado a un satélite atrape las partículas que la conforman. “En la actualidad, la mayoría de estos sistemas siguen una estrategia preprogramada y no pueden asimilar rápidamente cambios en los datos, de modo que deben recalcular las trayectorias. Esto les lleva demasiado tiempo en situaciones en las que es preciso actuar en una fracción de segundo”, añade Billard.
Para idear su brazo robot, los ingenieros de LASA utilizaron una técnica, denominada programación por demostración, que se inspira en la forma en que aprendemos los humanos, mediante imitación, ensayo y error.
Esta no da direcciones concretas a la máquina, sino que le muestra ejemplos de posibles trayectorias. Durante esta fase, los objetos se arrojan varias veces en la dirección del robot. Mediante cámaras situadas a su alrededor, la máquina crea un modelo que tiene en cuenta desde su velocidad hasta su movimiento rotacional. A partir de esos datos, puede incluso corregir su posición en milisegundos, sincronizar los movimientos de sus dedos y atrapar el objetivo con precisión.
Daniel Cascallana Vega
No hay comentarios:
Publicar un comentario